EtherCAT運動控制器(三) 基于PLC實現多軸直線插補的技術開發詳解
在現代工業自動化領域,多軸協同運動控制是實現復雜加工軌跡、提升生產效率的關鍵。EtherCAT以其卓越的實時性和拓撲靈活性,已成為高端運動控制系統的首選總線協議。本文將深入探討如何基于PLC(可編程邏輯控制器)平臺,結合EtherCAT運動控制器,實現高效、精確的多軸直線插補功能,涵蓋從技術原理到軟件開發的完整路徑。
一、 核心概念:EtherCAT與直線插補
- EtherCAT運動控制器:它作為從站設備,直接連接伺服驅動器,負責接收主站(通常是PC或PLC)的運動指令,并高精度地控制電機位置、速度與扭矩。其內部集成了強大的運動控制算法(如插補、位置環等),通過EtherCAT總線實現微秒級的同步通信。
- 直線插補:指控制兩個或兩個以上的運動軸,使其按照設定的速度,從當前位置同步、線性地運動到目標位置。在多軸空間中,這表現為工具末端沿一條空間直線軌跡運動。這是CNC加工、機器人抓取等應用的基礎功能。
二、 系統架構與數據流
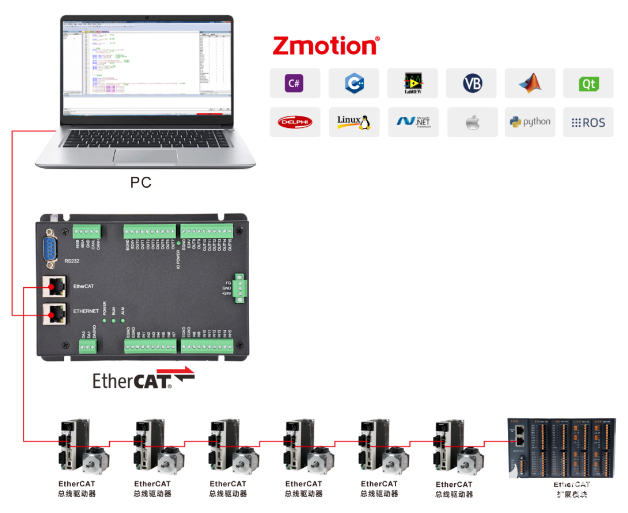
典型的基于PLC的實現架構如下:
- 主站(PLC):采用搭載EtherCAT主站協議的PLC(如倍福TwinCAT、Codesys Runtime、三菱/歐姆龍的高端型號等)。它作為總線的“大腦”,負責:
- 邏輯控制:處理工藝流程、安全聯鎖等。
- 路徑規劃:根據加工任務,計算多軸直線插補的路徑點、速度曲線。
- 指令下發:通過EtherCAT周期數據(PDO)將目標位置、速度等參數實時發送給各個運動控制器從站。
- 從站(EtherCAT運動控制器):每個控制器管理一個或多個伺服軸。它接收主站的指令,并執行:
- 本地閉環控制:進行高頻率的位置環、速度環、電流環控制。
- 插補同步:嚴格遵循主站發出的同步時鐘(DC,分布式時鐘),確保所有軸在精確的同一時刻啟動、停止和運行,這是實現高精度直線軌跡的關鍵。
- 數據流:在一個通信周期內(通常為1~2ms),PLC主站將計算好的各軸下一周期的目標位置寫入對應的PDO,并通過EtherCAT幀廣播出去。各運動控制器在幀經過時“On the Fly”讀取屬于自己的數據,并立即執行。各控制器也將實際位置、狀態等反饋數據寫入幀,供主站讀取,形成閉環。
三、 PLC軟件實現的關鍵步驟
在PLC編程環境中(以IEC 61131-3標準的CoDeSys平臺為例),實現多軸直線插補通常遵循以下步驟:
- 硬件組態與網絡配置:
- 在IDE中掃描并添加EtherCAT主站設備。
- 通過ESI文件導入或自動掃描,將所有的EtherCAT運動控制器從站添加到網絡拓撲中。
- 配置分布式時鐘(DC),確保主站與所有從站的時間嚴格同步。
- 映射過程數據對象(PDO),定義主站與每個運動控制器之間交換的輸入(如實際位置、狀態字)和輸出數據(如目標位置、控制字)。
- 軸參數配置與調試:
- 為每個物理軸創建對應的軟件“軸”對象(如
AXIS_REF)。
- 配置電機與負載的詳細參數(電子齒輪比、行程限位、回零方式等)。
- 通過在線調試功能,逐一進行伺服使能、回零操作,確保單軸運行正常。
- 多軸直線插補編程:
- 使用封裝好的功能塊:這是最常用和高效的方式。例如,在CoDeSys的Motion Control庫中,直接調用
MC<em>MoveLinear或MC</em>MoveLinearRelative功能塊。
- 功能塊參數設置:
AxisGroup:指定參與插補的多個軸構成的組。
Execute:觸發運動的布爾信號。
Position/Distance:在空間坐標系中指定的絕對目標位置或相對位移(對于XYZ三軸,這是一個三維向量)。
Velocity,Acceleration,Deceleration:設定軌跡的速度曲線。
BufferMode:決定如何銜接連續的運動指令(立即、順序、混合)。
- 編程邏輯:在PLC的程序組織單元(POU)中,根據工藝邏輯,在適當的時候(如收到啟動信號、上一步完成)置位
Execute管腳,并填入目標坐標和速度參數,即可啟動一次多軸直線插補運動。
- 路徑規劃與前瞻處理:
- 對于連續的線段軌跡,為了獲得平滑的速度曲線和更高的加工效率,需要在PLC中實現或調用路徑前瞻算法。該算法會預先讀取一段程序中的連續移動指令,進行速度優化,自動在拐角處進行速度衰減,避免沖擊和過沖。高級的PLC運動控制庫通常集成此功能。
- 狀態監控與錯誤處理:
- 實時讀取各運動控制器返回的
StatusWord、ErrorCode和實際位置。
- 在程序中實現完善的錯誤處理邏輯,如伺服故障時觸發安全停止、報警并記錄日志。
四、 技術開發要點與挑戰
- 實時性保障:確保PLC任務周期與EtherCAT通信周期穩定且匹配。運動控制任務應放在最高優先級的循環任務中。
- 同步精度:正確配置和使用分布式時鐘是消除軸間跟隨誤差、保證直線軌跡精度的基石。
- 坐標系管理:對于復雜系統,需要在工件坐標系、工具坐標系和機器坐標系之間進行靈活轉換和編程。
- 性能優化:合理設置通信周期的長度(在滿足控制精度的前提下盡可能短),優化PDO映射以減少數據量,提升系統響應速度。
- 選型匹配:確保PLC主站的EtherCAT主站性能、運動控制庫功能與運動控制器的能力(如支持的最大軸數、插補模式)滿足項目需求。
五、
通過將強大的EtherCAT運動控制器與靈活通用的PLC平臺相結合,開發者能夠構建出高性能、高可靠性的多軸直線插補系統。其核心在于利用EtherCAT的硬實時通信能力,將PLC的路徑規劃優勢與運動控制器的本地閉環控制優勢深度融合。掌握從硬件組態、網絡配置到軟件編程(特別是標準運動控制功能塊的使用)的全流程,是成功實施此類技術開發的關鍵。隨著軟PLC和基于PC的控制技術的普及,這一方案正變得越來越開放和高效,為智能制造提供了堅實的運動控制基礎。
如若轉載,請注明出處:http://www.qgzo.cn/product/65.html
更新時間:2026-04-24 22:08:20